Edge Computing for Ecological Monitoring
My first exposure to the use of Neural Network based object detection in ecology was during my PhD in Computer Science at Monash University around 2020. I was assisting ecologists in their use of YOLO-based object detectors to automatically filter out “empty” image frames collected with traditional camera traps. At the time, this was a relatively novel application that required the transportation and handling of hundreds of GBs of video data that contained nothing of interest.
By 2026, the use of these “AI” object detection models has become far more widespread due to the availability of powerful open-source models such as MegaDetector and SpeciesNet, which provide general-purpose animal detection and, in some cases, species identification capabilities. Most of these “AI” based ecological monitoring projects follow the same workflow: deploying camera or audio traps, collecting large volumes of data, and transporting hundreds of gigabytes or even terabytes of information for later analysis.
But what if we do it… on the edge.
As an alternative, edge computing is emerging as a transformative tool for ecological monitoring, enabling Neural Network models to process data directly where it is collected rather than relying on traditional post-processing workflows.
Despite the potential of edge computing, the field is still dominated by this traditional workflow touting it as a new revolutionary technology, despite the core algorithms being over a decade old! I believe that one reason for this may be because cameras are often viewed differently from other environmental sensors. Temperature, humidity, pH, and similar sensors perform processing at the point of collection, converting raw voltage measurements into useful information before transmitting results.
A fox detected in real time with an object detection model running on the edge.
Cameras, however, are frequently treated as devices that simply capture pictures of things, and that those pictures can later be inspected by a human or machine. A more useful perspective is to consider cameras the same as any other sensor, they contain a large grid of tiny light sensors that simply measure light intensity. Through real-time image processing and neural network inference, this grid of light intensity data can be converted directly into meaningful ecological information at the point of collection. Instead of transporting large amounts of collected images and video, we can instead create systems that can extract relevant information on-site and communicate only the results required for analysis.
Is Edge Compute Object Detection Practical?
The primary challenge of edge computing has been the computational and energy requirements associated with running neural networks in remote locations. To run object detection models require more costly hardware and substantially more processing power than traditional environmental sensors. However, these limitations have rapidly diminished.
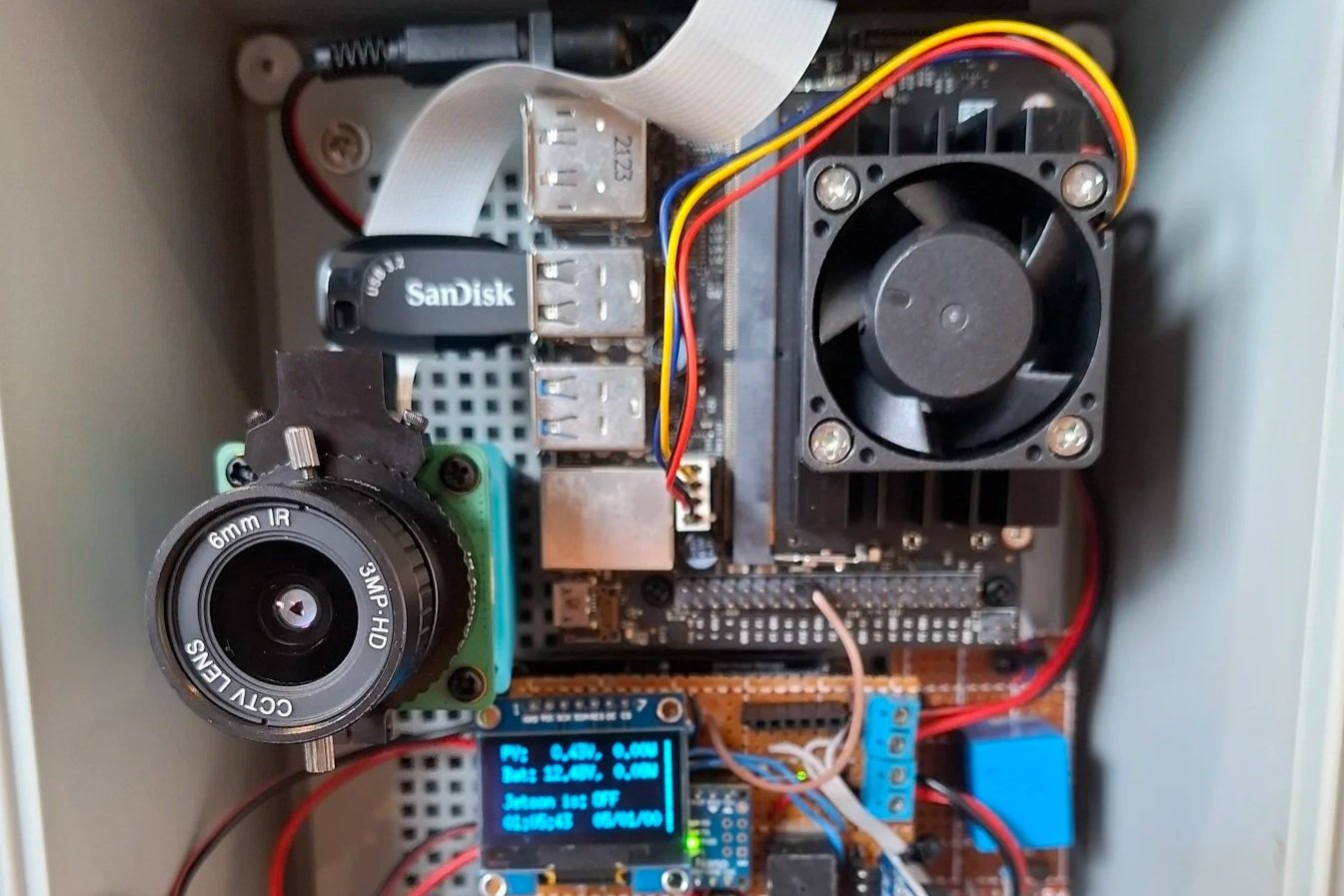
An early prototype using an early NVIDIA Jetson Nano.
Early NVIDIA Jetson Nano devices with their 0.5 TOPS of GPU compute were capable of running small YOLO models at practical frame rates while consuming approximately 5–10 watts of power. Modern edge AI hardware now delivers dramatically higher performance and efficiency. Systems operating within a similar power budget can achieve 20 TOPS or more of neural network performance, enabling larger models, higher frame rates, and higher-resolution image processing. New neural network accelerators continue to improve both performance and efficiency, reducing the energy requirements needed to run practical ecological monitoring systems. As a result, edge computing is becoming increasingly viable and is likely to become a standard approach for future long-term ecological monitoring deployments.
The transition to edge computing requires significant changes to monitoring workflows and infrastructure. Training, exporting, deploying, and managing AI models for edge compute infrastructure differs meaningfully from traditional camera trap approaches. And while current deployments still require relatively large batteries and solar panels, these systems are now practical for many field applications. Preparing for this transition now will allow organizations to take advantage of increasingly capable edge AI hardware as it continues to mature.

Field test of the AutoEcology camera box, using the camera and custom trained YOLO object detector to monitor for Foxes 24/7
What do you need for a practical system?
A critical consideration in edge AI system design is selecting appropriate hardware. While ultra-low-power microcontroller chips with neural network accelerators in the range of 0.5–1 TOPS exist, they are generally unsuitable for many real-world ecological monitoring applications. These systems can often run only very small object detection models, process low-resolution images, and achieve limited frame rates. Real world practical performance is usually constrained by these three key factors: inference speed, image resolution, and model size.
Inference rate refers to the number of image frames that our hardware can process per second. Higher inference rates improve the ability to detect fast-moving or small animals and increase the number of observations available for post-processing verification. Multiple detections can be compared over time to reduce false positives and improve confidence in automated decisions. Higher frame rates also make monitoring systems more responsive to events occurring within the environment.
Image resolution is an even more important consideration. Neural networks identify objects by extracting visual features such as colours, textures, patterns, and shapes from images. For species identification tasks, the model must detect features that distinguish one species from another while ignoring similar-looking background objects. As I’ve discussed in previous articles, neural networks often seek the simplest solution that fits the training data. For example, a model trained to detect a red bird may simply learn to identify the colour red unless it is also trained to ignore other red objects. As more species are added to a model, and as the visual differences between species become more subtle, the model must extract increasingly specific features and combine them in increasingly sophisticated ways.
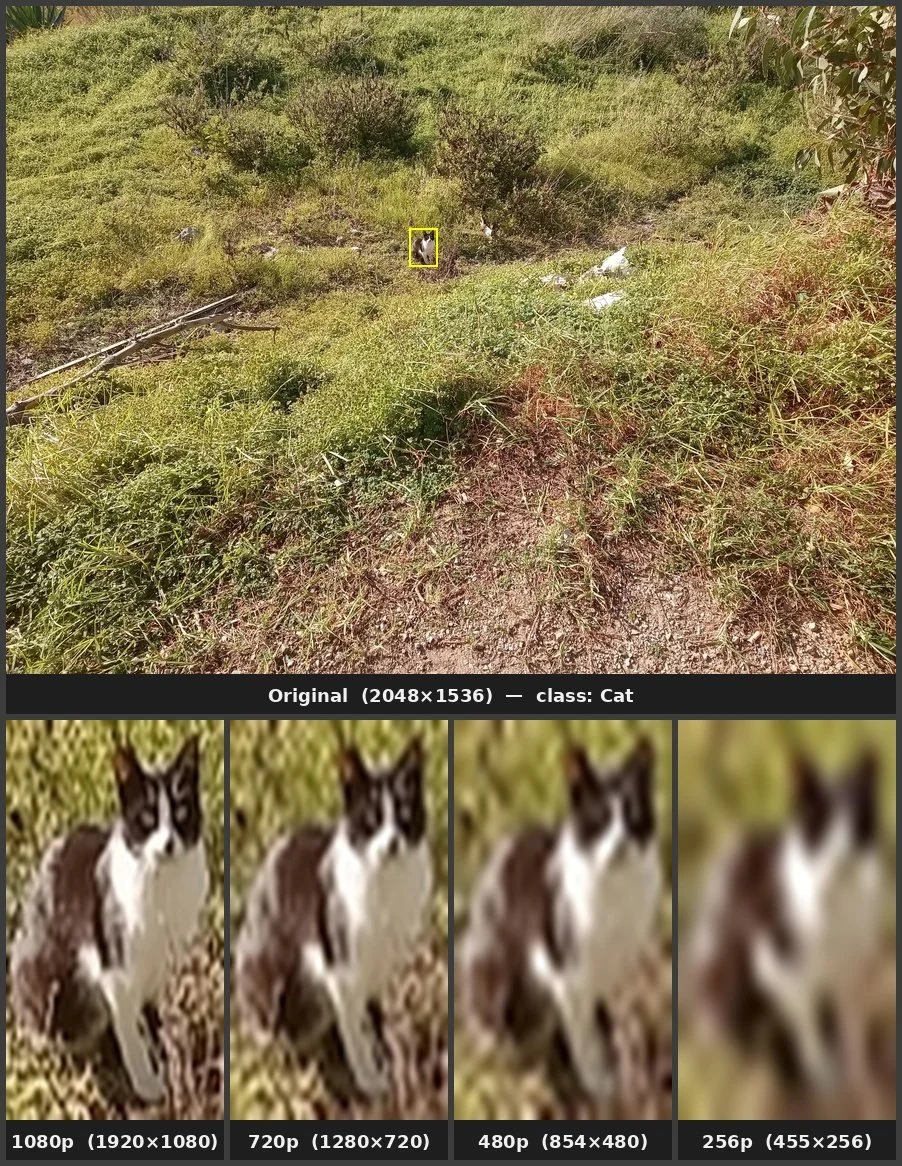
Crops of an Image first scaled to different resolutions. To correctly ID an object at a distance you need high resolution!
The ability to extract these distinguishing features depends heavily on image resolution. Features must actually be visible within the image for the model to detect them. A rough metric you can use when determining whether a certain resolution will be suitable for your application is the absolute number of pixels occupied by an animal within an image.
If your target is small or very far away then, it will only take up a few pixels. If you were to double the resolution you approximately quadruple the total number of pixels that represent that object. Increasing image resolution increases the number of pixels representing the animal, capturing more information and making subtle identifying features easier to detect. Higher-resolution imagery therefore enables accurate identification at greater distances and improves overall detection performance.
Model size represents the third major constraint. As the number of target species increases, or as classification tasks become more complex, neural networks require additional parameters to learn increasingly complex feature representations. Larger models typically provide higher accuracy but demand more computational resources. For this reason, edge deployments often benefit from models specifically trained for the species of interest rather than attempting to identify every possible species. Targeted models can achieve higher performance while remaining computationally practical for field deployment.
These limitations explain why very small microcontroller-based systems are often demonstrated successfully in controlled environments but perform poorly in real-world monitoring scenarios. They are generally restricted to low-resolution processing, often at a maximum resolution of 256×256 pixels, and can only run small models. In many ecological applications, they lack the accuracy, range, and flexibility required for effective monitoring that provides real results.
We’ve been busy building…
Consequently, at AutoEcologywe are focusing on more capable computing platforms paired with dedicated neural network accelerators that can support practical ecological monitoring workloads.
We are conducting ongoing research and development into hardware and software systems designed to deploy deep learning models in remote environments for ecological monitoring. Through this work, we have prototyped and tested multiple device configurations tailored to different field requirements and have developed custom hardware to support their operation.
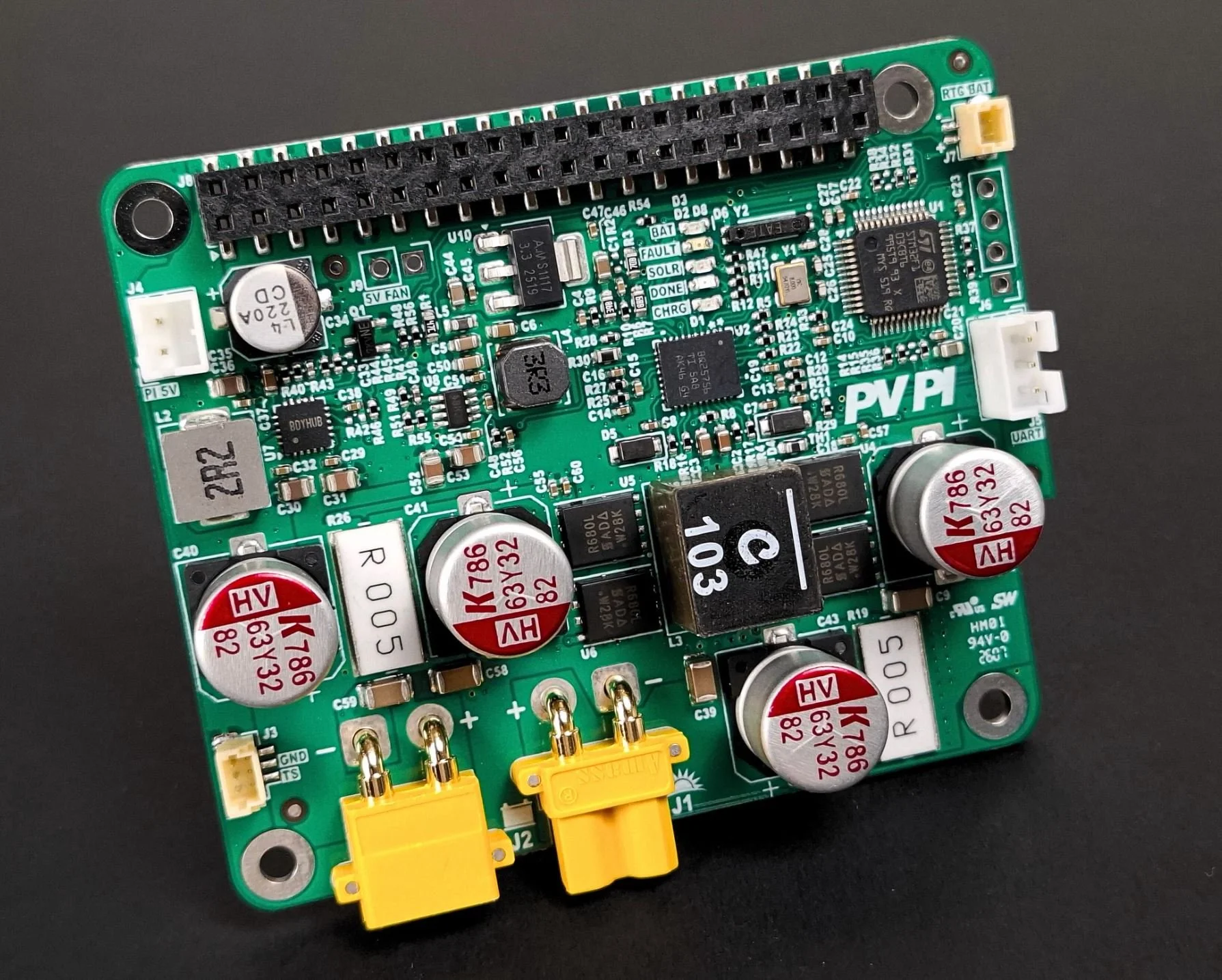
The PV Pi - a solar battery power management system for SBCs
One outcome of this development effort is the PV Pi, a solar battery power management system designed for single-board computers such as the Raspberry Pi. The PV Pi enables the use of large 12-volt lithium iron phosphate batteries and solar panels exceeding 100 watts, allowing moderate-power monitoring systems to operate indefinitely in remote locations.
Building upon this foundation, we have also developed complete camera systems based on Raspberry Pi platforms and custom carrier boards. These systems integrate solar charging, battery management and 4G connectivity. At the core of these devices is the Hailo-8 neural network accelerator, providing up to 26 TOPS of compute performance. This enables medium-sized object detection models to operate at more than 30 frames per second. Unlike low-power microcontroller systems, our platform can process images at resolutions of 1080p or more, allowing substantially greater detection distances and improved identification performance.

AutoEcology Day/Night Camera for 24/7 monitoring
Using a wide-angle lens, our systems can detect cat-sized animals at distances of up to 10 meters. By using lenses with longer focal lengths, detection distances can be extended significantly further. The increased image resolution and compute capacity provide the level of performance required for practical ecological monitoring applications.
AutoEcology has conducted multiple field trials and deployments, including collaborations with conservation organizations. These trials have demonstrated that edge AI monitoring systems are not only technically viable but represent the future of camera-based ecological monitoring. Processing data directly at the edge reduces reliance on cloud-based post-processing workflows, decreases data transmission requirements, and enables real-time ecological insights.

AutoEcology Day time only camera, more compact with an internal battery and smaller solar panel
We continue to expand and refine both our hardware and software platforms. While the PV Pi was our first commercial product, it represents only the beginning of a broader roadmap focused on enabling ecologists, conservation groups, and research institutions to deploy their own edge AI systems for both visual and bioacoustic monitoring applications. Future products will provide increasingly comprehensive and accessible solutions for deploying AI-powered ecological monitoring systems in the field.
Organizations interested in trialing, deploying, or learning more about AutoEcology’s current technology, including our camera box systems and edge AI monitoring platforms, are encouraged to contact us for further information.